ROS 2 in Science Robotics
Way back in 2009 a group of scrappy graduate students, research scientists, and university professors, published a paper at the International Conference of Robotics in Automation (ICRA) titled, “ROS: an open-source Robot Operating System.” This paper discussed a new open-source project the group had been working on over the previous two years. They hoped that the paper would convince other researchers to join them in building a shared code-base for robotics research, and consequently accelerate the pace of innovation in the field. Thirteen years later it is safe to say that the paper had quite the impact; to date the publication has been cited over 9640 times. Today ROS plays an outsized role in the robotics industry - commercially, academically, and everywhere in between — and has become the de facto standard for robotics . It is simple to see why, ROS has created a common platform for robotics , and it allows roboticists to easily package and share their code, data, and results. On Monday we’ll release the second long term support (LTS) distribution of ROS 2: Humble Hawksbill, and we decided it is about time that ROS 2 have its own canonical publication. As such, we’re happy announce that our paper, “Robot Operating System 2: Design, architecture, and uses in the wild” was just published in the journal Science Robotics!
Since the publication of that original paper we have released fourteen ROS 1 distros, and more recently ROS 2, the next major iteration of ROS. The first long-term support (LTS) release of ROS 2, Foxy Fitzroy, was released in May 2020 (the next LTS Release, Humble Hawksbill, will be released on 5/23/2022). The ROS community took this new-and-improved version of ROS and quickly started building robots, conducting research, and launching products. It quickly became apparent that the time was right to create a new publication to formally introduce ROS 2 and to provide a paper for academics to cite in their works.
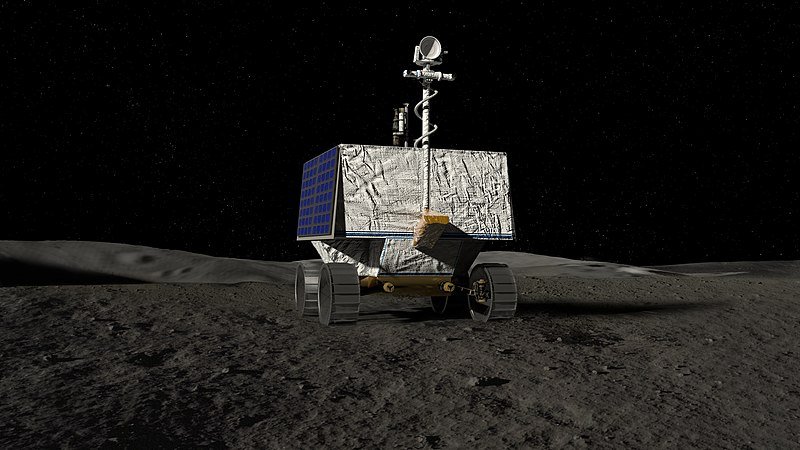
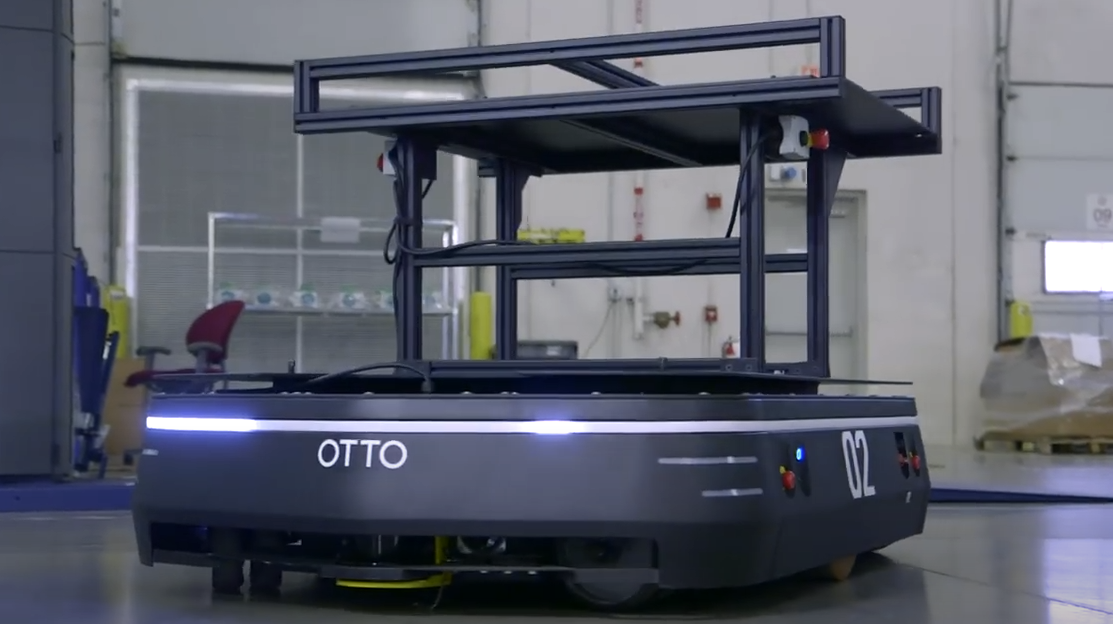
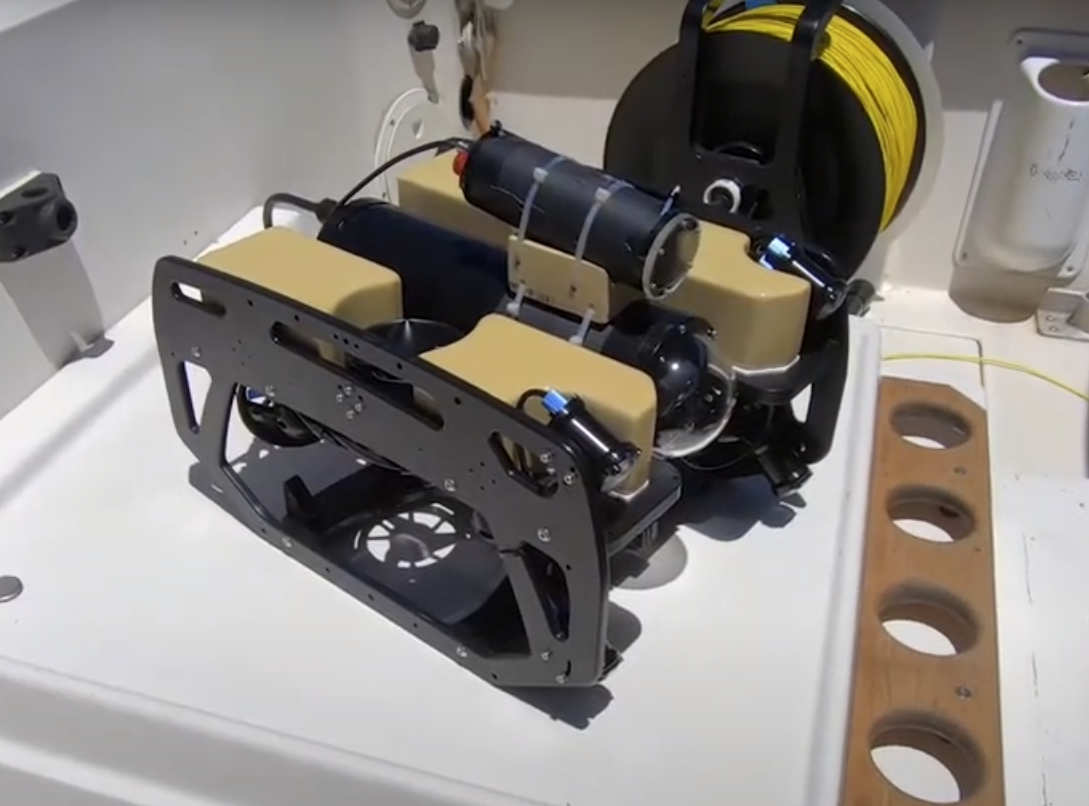
For this publication we decided to collaborate with Steve Macenski, lead developer of Nav2 at Samsung Research, and to highlight the many different domains where ROS is having an impact. More specifically, we wanted to highlight all of the different sub-disciplines that are using ROS 2 to solve tough problems out in the real world. Nominally, we called these domains land, sea, air, space, and industry and set about finding collaborators in each domain. We landed on five case studies of ROS 2 users, including Mission Robotics, Auterion Air, NASA VIPER Lunar Rover , and OTTO Motors. We showed how ROS 2 has not only helped them succeed, but also how it accelerated their time to the market, structured collaborations, and saved resources. The results are a seminal work describing ROS 2 for current and future users. The paper is also a fantastic overview and common reference for the concepts behind ROS 2 and its design and architecture. The final paper was published in Science Robotics on May 12, 2022, and it can be found at this link or using the DOI 10.1126/scirobotics.abm6074.

We believe that the final paper is an incredible resource for academics and industry alike. This paper also serves as an important tool to measure the growth of ROS 2. We can now track the adoption of ROS 2 across both academic publications and industry white papers. We’re asking that all ROS 2 users, refer to this paper when citing ROS 2 in their works. The complete Bibtex entry for the paper is available in the ROS 2 documentation.
We’re incredibly grateful to the robotics community who helped make ROS a success, and we look forward to seeing all of the subsequent works that cite this publication. We always want to hear about what ROS users are working on, whether it is commercial or academic in nature; and we encourage all ROS users to post about their recent accomplishments and publications on ROS Discourse. We firmly believe that the every publication that uses ROS is a great achievement for our global robotics community.