OSRA announces technology strategy for 2026
The OSRA is pleased to announce that the Open Robotics Technology Strategy for 2026 has been published.
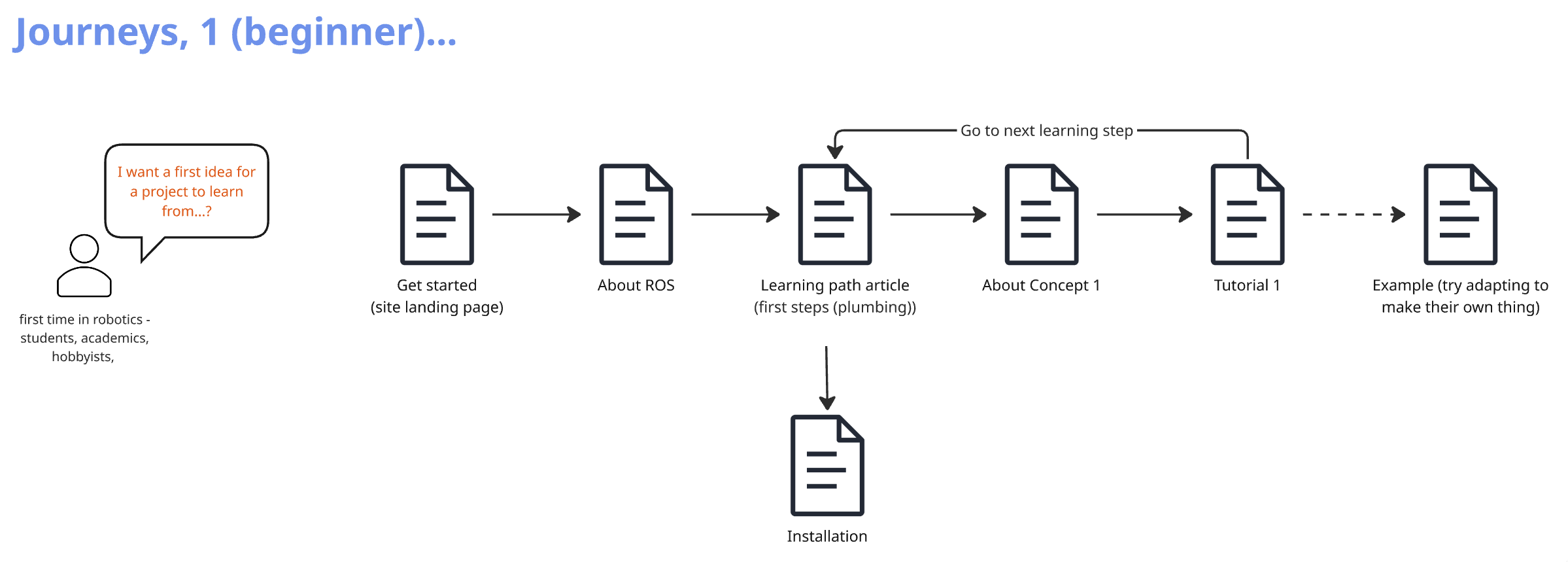
OSRA Projects Documentation Overhaul: New Information Architecture Design Complete
The OSRA is pleased to announce the completion of a significant milestone in overhauling our project documentation: the design of the new information architecture is complete, and we are ready to begin modifying our documentation tool chains and content to deploy it.

New Build Farm Backer Program & Infra Team Swag
Ever wonder how sudo apt install just works for ROS? That’s the magic of the OSRF Build Farm!
This beast serves over half a billion packages a year, saving us all from the headache of compiling from source. But maintaining this critical utility takes massive server power and a dedicated team of engineers.
To keep the lights on and the builds green, we are launching the Build Farm Backer campaign!
We need your help to support the hardware and the humans behind the open source robotics ecosystem. You can back the farm directly with a tax-deductible donation or by grabbing some fresh Infra Team swag from our new shop.
Check out the full post to see how you and your employer can support the tools we all rely on!
Open Robotics launches Zulip chat server
Please join us on the official Open Robotics Zulip chat server. This chat server brings together all parts of our community, including the project maintainers, in a unified space where everyone can talk to each other and see what’s going on.
Launch of the OSRA's new Robotics Enhancement Proposal (REP) process
The OSRA Technical Governance Committee has officially ratified a new Robotics Enhancement Proposal (REP) process. This is the successor to the original ROS Enhancement Proposal process and creates a unified framework for developing technical specifications across all OSRA projects.
OSRA's Technical Governance Committee Approves $250,000 Funding for Infrastructure and Documentation Enhancement
The Technical Governance Committee (TGC) of the Open Source Robotics Alliance (OSRA) has approved funding of US$250,000 to significantly enhance project infrastructure and documentation across the OSRA ecosystem. This funding will focus on maximising value across all OSRA projects through strategic improvements in two key areas.

ROS 2 Kilted Kaiju Released
Happy World Turtle Day! Today, we are happy to announce the eleventh release of ROS 2: Kilted Kaiju! Kilted is a standard release, and will be supported until November, 2026. If you like the fantasic release art by our artist, Ryan Hungerford, our Kilted t-shirt and merchandise store is still open! All proceeds help support the Open Source Robotics Foundation (OSRF) and its projects.

OSRF Adopts Policy on Use of Generative AI in Contributions
The rise of Generative AI tools in software development presents both challenges and opportunities for open-source projects. While these tools can boost productivity and creativity, they also raise concerns about ownership and ethical use. The OSRF is developing a comprehensive policy to address these issues, ensuring project integrity and fostering an inclusive environment. The Technical Governance Committee initiated a Technical Committee to explore how other foundations handle these challenges, leading to a policy draft that was approved by the TGC and ratified by the OSRF Board, marking a significant achievement for the community.


Open Robotics and Google Summer of Code 2024
It’s time for another Google Summer of Code (GSoC)! We have five contributors this year, all working on improving aspects of Gazebo. Rakesh Vivekanandan, Helena Moyan and Gaurav Kumar will be working with Woensug Choi and Mabel Zhang on physics-based sonar simulation for underwater robots. Saurabh Kamat will be working with Jose Luis Rivero on improving how users install Gazebo. Yaswanth Gonna is going to help Steve Peters put together an improved set of worlds for benchmarking physics engines.

ROS 2 Jazzy Jalisco Released
The OSRF is are happy to announce the tenth release of ROS 2, Jazzy Jalisco, released on May the 23rd, 2024! Jazzy is a Long Term Support release that will be supported until the end of May, 2029.
Announcing the Open Source Robotics Alliance
Open Robotics (OSRF) is pleased to announce the creation of the Open Source Robotics Alliance (OSRA). The OSRA is a new initiative from the OSRF to ensure the long-term stability and health of our open-source robot software projects.

Audrow Nash to step down from hosting the Sense, Think, Act podcast
Audrow Nash is moving on to the next phase of his podcasting career and will be stepping down as the host of the OSRF’s Sense, Think, Act podcast. Under Audrow’s masterful leadership and hosting, Sense, Think, Act has become one of the premier places to hear interviews with leaders in the world of robotics.

ROSCon 2023 Recap
ROSCon 2023, our twelfth annual ROS developers' conference, was held in New Orleans, Louisiana on October 18-20, 2023. The conference was a success, bringing together over 700 ROS developers from 42 countries to learn from each other and share the latest advances in ROS and robotics technology. We were also thrilled to see the Dronecode Foundation’s flagship PX4 Developers’ Summit hosted immediately after ROSCon in the same venue, allowing a number of attendees to attend both events and learn from others in a closely-related field (not to mention see a fantastic drone show put on by the Dronecode Foundation and UVify!).

Gazebo Harmonic Released!
The Gazebo team is happy to announce the 8th release of Gazebo, “Gazebo Harmonic”. This new release represents a year of development by our Gazebo developer community, and it is one of our biggest Gazebo releases yet! The release is jam packed full of new features, and we believe that most Gazebo users will be excited to upgrade as soon as possible! A complete list of features can be found in the release notes, but we wanted to take a moment to point out some of the highlights.

Google Summer of Code & Virtual RobotX
Meet Tejal, one of our Google Summer of Code students for 2023.

Gazebo 2023 Google Summer of Code
We’re really excited to announce our Google Summer of Code (GSoC) students for 2023. This year we are mentoring two GSoC students who are helping us with the development of new features for Gazebo that will hopefully make it into the Gazebo Harmonic release later this year. We asked the students to share a little bit about themselves and what they plan to work on over the summer.