
Gazebo Harmonic Released!
The Gazebo team is happy to announce the 8th release of Gazebo, “Gazebo Harmonic”. This new release represents a year of development by our Gazebo developer community, and it is one of our biggest Gazebo releases yet! The release is jam packed full of new features, and we believe that most Gazebo users will be excited to upgrade as soon as possible! A complete list of features can be found in the release notes, but we wanted to take a moment to point out some of the highlights.

Improving Simulation Interoperability and Domain Randomization with MuJoCo and DeepMind
Today we are happy to announce that we have released the sdformat-mjcf library that allows for seamless conversion between the two formats! The software is currently available on PyPI and allows users to convert models / worlds, joints (such as ball, continuous, fixed, prismatic, and revolute joints), sensors (such as altimeters, cameras, force torque sensors, and IMUs) and materials between the two formats. In practical terms this means that users of both MuJoCo and Gazebo are able to quickly and easily toggle between the two simulation environments. This new tooling opens up the entire universe of models available for Gazebo to the MuJoCo user community, and provides MuJoCo users with the capability to use their models in Gazebo.


SubT Part 5: Results and the Future
This is the final post in our SubT series, in which we’ll cover the results and where SubT is going now that the competition is over.
SubT Part 4: Cloudsim
Welcome to the fourth article in our five part SubT series. Today we will be covering Cloudsim, the open source application developed at Open Robotics to run Ignition on cloud infrastructure.
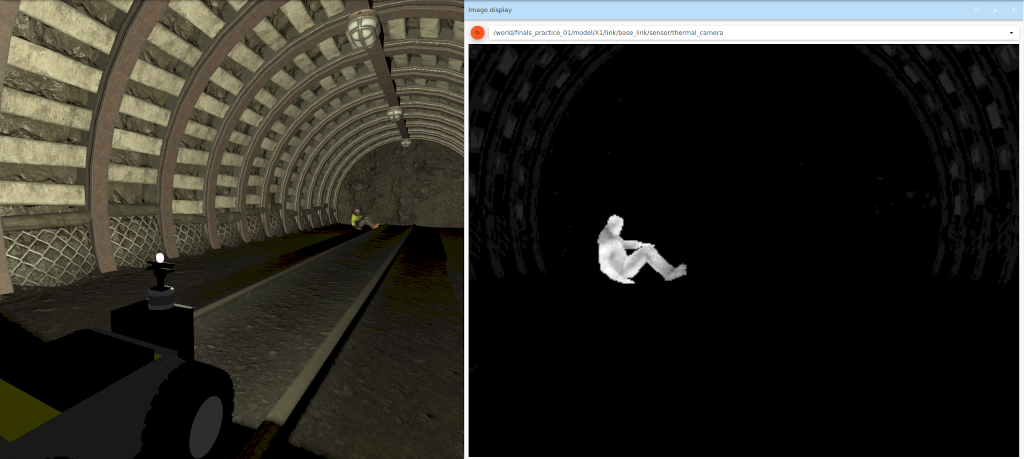
SubT Part 3: Ignition
This is the third article in our five part SubT series. In this article I’ll talk about Ignition, which provided the simulation capabilities for SubT.

SubT Part 2: Robots and Environments
Welcome to the second article in our SubT series. In this post we’ll go over the different robots and environments developed for SubT.

SubT Part 1: Introduction
This is the first in a series of five blog posts about SubT from the perspective of Open Robotics. We’ll cover basics about the challenge, offer insights about how we established the competition infrastructure, describe new features developed for SubT, and add commentary to the final results.

Keeping the lights on
You know Open Robotics as a hub of the global robotics industry through our open software and hardware platforms for robotics. But many wonder how we operate and grow as a business. We do these things by offering a wide array of research, development, and consulting services to industry and government customers around the world. We design our customer engagements so that we can share key results in open source solutions for the benefit of the global robotics community.

A Common Language for Robot Interoperability
For over three years, we have been collaborating on the Open Robotics Middleware Framework (Open-RMF); a free, open source, modular software system that coordinates multiple fleets of indoor and outdoor robots and integrates them with elevators/lifts, doors and other infrastructure.
Ignition Fortress Released
The simulation team at Open Robotics is happy to announce another major release of Ignition, codenamed Edifice! This is the fifth major release of Ignition, following Dome, Citadel, Blueprint and Acropolis.



Ignition Edifice Released
The simulation team at Open Robotics is happy to announce another major release of Ignition, codenamed Edifice! This is the fifth major release of Ignition, following Dome, Citadel, Blueprint and Acropolis.


ROMI-H: Bringing Robot Traffic Control to Healthcare
Learn how Open Robotics is building the infrastructure necessary to orchestrate teams of robots working in complex environments.

Ignition Dome Released
The simulation team at Open Robotics is happy to announce another major release of Ignition, codenamed Dome! This is the fourth major release of Ignition, following Citadel, Blueprint and Acropolis.